
主動球窩關節傳動機構
分享到:



- 領域:其他工程及工程業
- 研發教師:葉松瑋
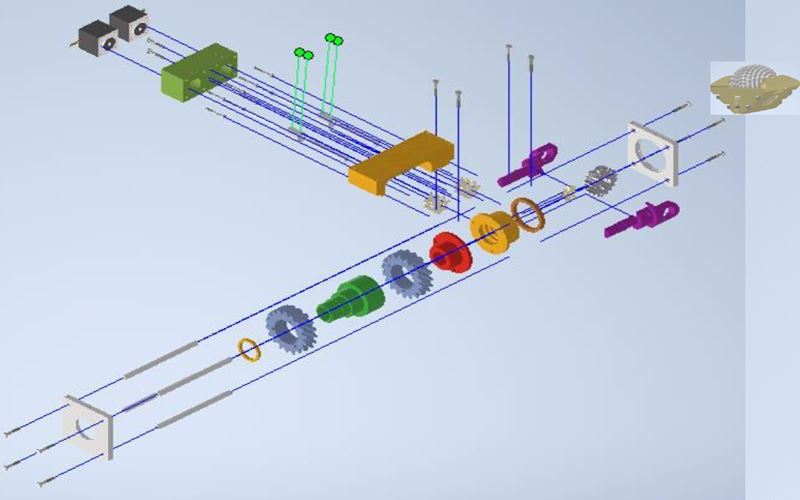
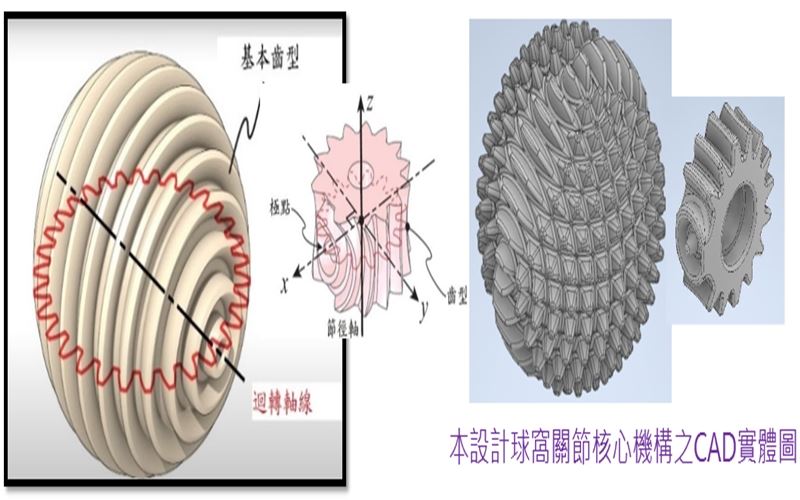
- 技術說明: 本產品提出一種通過球形齒輪相互作用的主動球窩關節機構設計。齒輪的關節驅動三個旋轉自由度而不會打滑。這些功能的設計來自兩種不同創新齒輪,交叉球面齒輪和單相齒輪之間的獨特相互作用,一個球面齒輪約束單相齒輪的兩個自由度中。單向齒輪的這種約束轉換為轉動,並通過兩個自由度步進直流馬達轉動球型齒輪。球型齒輪正交兩個齒輪引起的相互作用,以實現三個自由度驅動。本設計在驅動模塊的不同配置中也驗證了執行器放置的靈活性。主動球關節,無需定向傳感器即可在三個自由度中傳遞高扭矩和可靠定位,適用於機器人關節和定向控制機構。本產品達到節省裝置空間與專用化操作之選項。
- 創新特色: 本機構特色;
1. 過往機械手臂接只能以一個方向進行旋轉,而此案設計的球型齒輪正交兩個齒輪引起的相互作用,以實現三個自由度驅動
2. 本案來自兩種不同創新齒輪,交叉球面齒輪和單相齒輪之間的獨特相互作用,一個球面齒輪約束單相齒輪的兩個自由度。
3. 主動球關節,無需定向傳感器即可在三個自由度中傳遞高扭矩和可靠定位,適用於機器人關節和定向控制機構。
4. 從球窩關節驅動式機構產品爆炸圖CAD設計與實體組裝,證實本產品具可行性,且本提案具可專利之新穎性,與進步性。
瀏覽人次:5936